
Adagy Robotics API can stream RGB images and numerical data, such as joint angles, from robots to a web-based console.
Adagy System Network Latency
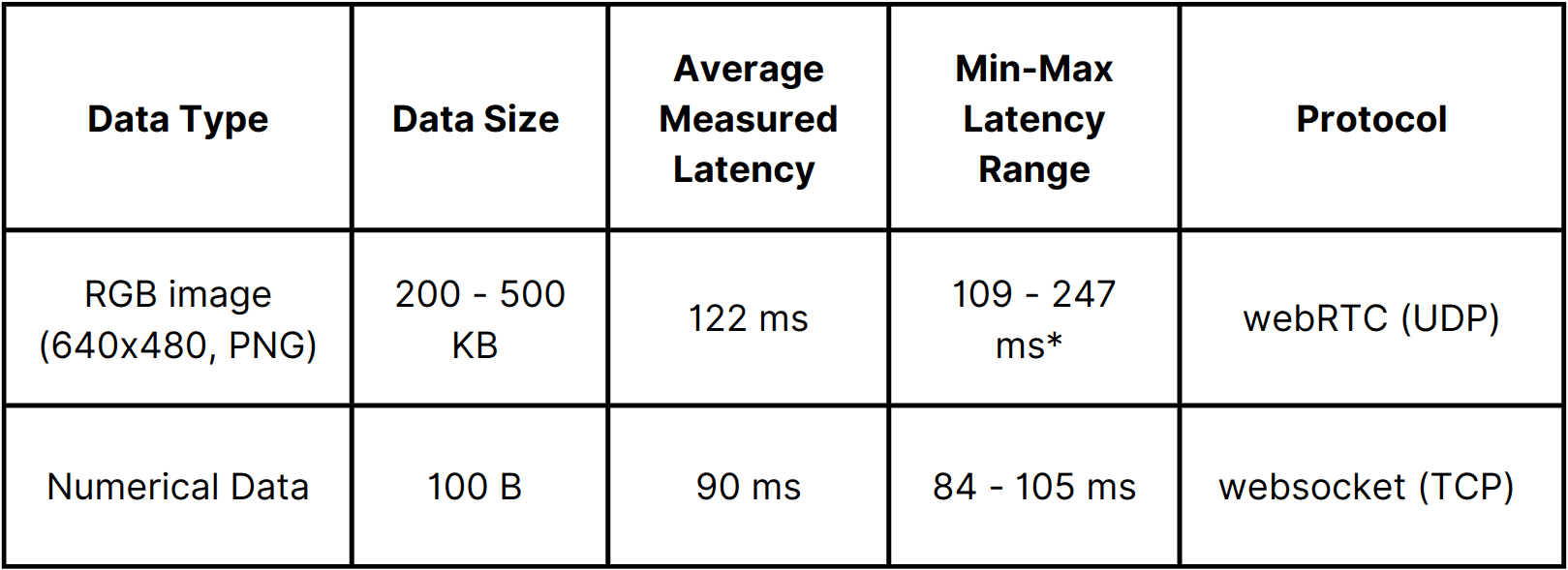
The latency given here is the average transit time from when the data leaves the robot to when it renders in the Adagy web server. These numbers assume the robot is already connected to Wi-Fi or is wired to a device which can communicate with the internet over Wi-Fi.
* The maximum time measured for image transfer latency (247 ms) occurred during a spike at the initial load of the webpage.
Encoding Latency
For faster transfers over the internet, we compress the images and encode them in a lightweight package.
When using ROS2 Image messages, the process to encode the message averages 28ms, which is an additional latency on top of the RTT listed in the table above.
The decoding latency is included in the total transit time described above.