How do you design a robot for human-in-the-loop control?
We’ve received a lot of questions about how best to design autonomous robots to work seamlessly with a remote teleoperation support system. Let’s dive in!
Designing Your Robot to Leverage Human Intelligence
Using remote teleoperation for edge cases and robot support can significantly change how you approach software development. You can now focus on higher-priority development tracks, rather than addressing every software crash that arises first in your software pipeline.
Here are a couple of important development considerations to prioritize early when building an autonomous robot that integrates remote teleoperation:
1. Tracking your edge cases
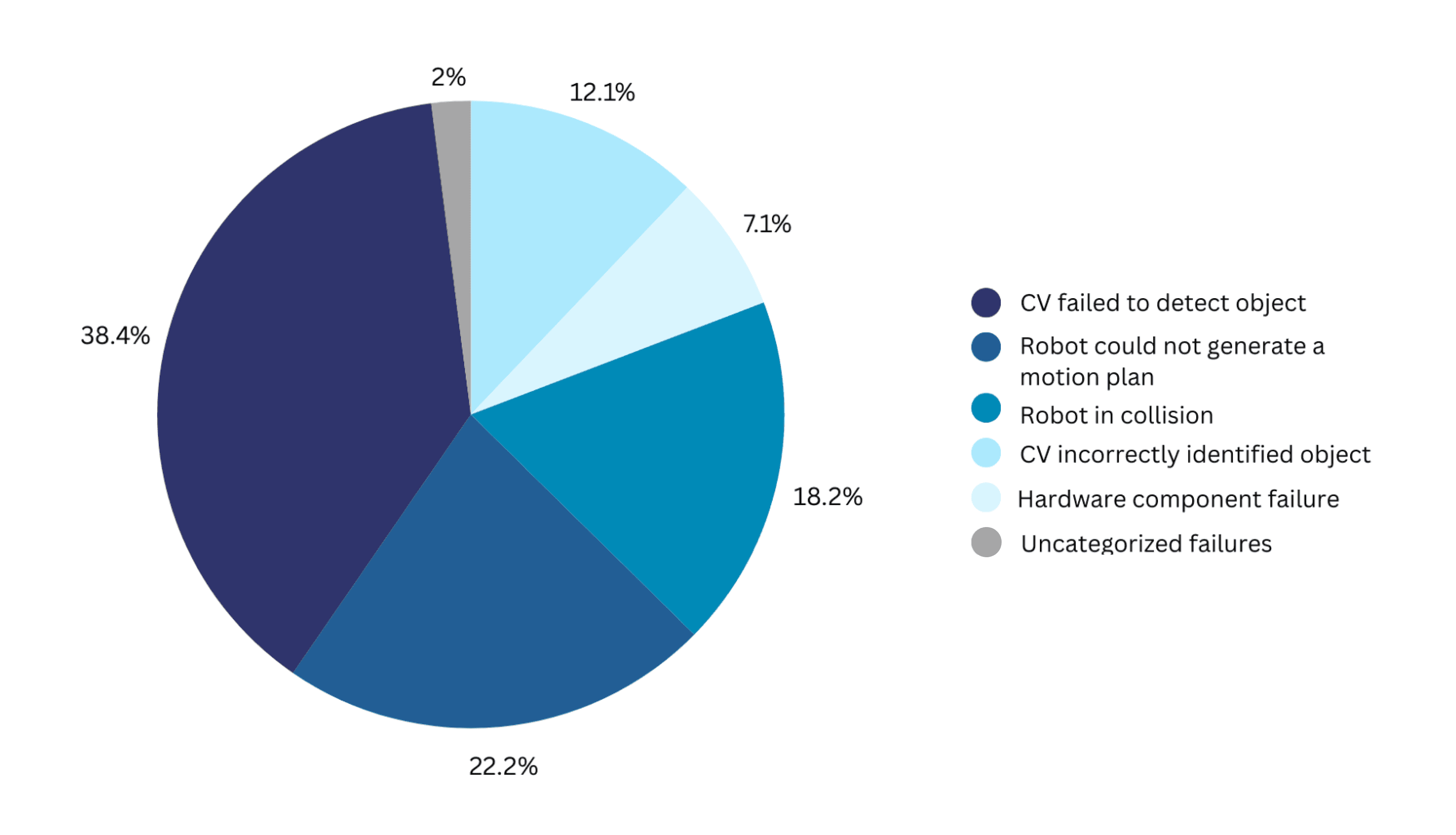
Just as cunning engineering leaders understand when a problem should be solved by classical robotics vs. by machine learning, they also understand when to bring human intelligence into the stack. To inform where human intelligence in the loop can accelerate your product development cycle, we recommend first retrospectively analyzing your edge cases. What failure modes have your robots encountered in the last four weeks, and how many times?
By analyzing this data, you can prioritize development efforts to focus on the most frequent failures, and hand off the less common failures to remote operators.
2. Designing for latency
Remote operations have inherent latency from round-trip network transfers and operator processing time.
Instead of trying to squeeze milliseconds of latency out of the networking solution, your robot’s software stack can be designed to account for latency. First, your robot should have onboard, high-rate safety systems, like obstacle avoidance, to ensure there are protections in place when executing lower frequency remote commands.
It’s helpful to implement higher-level commands, like waypoint trajectory navigation, that can simplify teleoperation by abstracting away low-level controls. Additionally, enforcing low-speed operations during teleoperation can enhance safety and precision.
Adagy employs advanced techniques to minimize network latency and ensures all communications are secured with encryption and VPN protocols, guaranteeing that your robot is not exposed to the internet at large.